-
1 subscriber system
абонентская система обработки данных
абонентская система
Система обработки данных, выполняющая функции, связанные с предоставлением или потреблением ресурсов вычислительной сети.
[ ГОСТ 24402-88]Тематики
Синонимы
EN
90. Абонентская система обработки данных
Абонентская система
Subscriber system
Система обработки данных, выполняющая функции, связанные с предоставлением или потреблением ресурсов вычислительной сети
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > subscriber system
-
2 telecommunications infrustructure standard for data centers
- стандарт на телекоммуникационную инфраструктуру центров обработки данных (ЦОД)
стандарт на телекоммуникационную инфраструктуру центров обработки данных (ЦОД)
-
[Интент]Стандарт TIA/EIA-942
Ассоциация TIA завершает разработку стандарта на телекоммуникационную инфраструктуру ЦОД—TIA/EIA-942 (Telecommunications Infrustructure Standard for Data Centers), который, по всей вероятности, будет опубликован в начале 2005 г. Основная цель данного стандарта — предоставить разработчикам исчерпывающую информацию о проектировании инфраструктуры ЦОД, в том числе сведения о планировке его помещений и структуре кабельной системы. Он призван способствовать взаимодействию архитекторов, инженеров-строителей и телекоммуникационных инженеров.
Помимо рекомендаций по проектированию, в стандарте содержатся приложения с информацией по широкому кругу тем, связанных с организацией ЦОД. Вот некоторые из них: выбор места для развертывания ЦОД; администрирование его кабельной системы; архитектурные вопросы; обеспечение безопасности и защита от огня; электрические, заземляющие и механические системы; взаимодействие с операторами сетей общего пользования.
Кроме того, в спецификациях стандарта отражены принятые в отрасли уровни надежности ЦОД. Уровень 1 обозначает отсутствие резервирования подсистем, а значит, низкую степень отказоустойчивости, а уровень 4 — высочайшую степень отказоустойчивости.
Стандарт TIA/EIA-942 определяет ЦОД как здание или его часть, предназначенные для организации компьютерного зала и необходимых для функционирования последнего вспомогательных служб. Компьютерный зал — это часть ЦОД, основным предназначением которой является размещение оборудования обработки данных.
В стандарте обозначены требования к компьютерному залу и комнатам для ввода кабелей (от сетей общего пользования). Так, для этих помещений определены: высота потолка (2,6 м); покрытие полов и стен; характеристики освещения; нагрузка на полы (минимальная — 732 кг/м2, рекомендуемая — 1220 кг/м2); параметры систем нагревания, вентиляции и кондиционирования воздуха; температура воздуха (20—25 °С), относительная влажность (40—55%); характеристики систем электропитания, заземления и противопожарной защиты.
В число телекоммуникационных помещений и участков ЦОД входят:
• Комната для ввода кабелей.
• Главный распределительный пункт (Main Distribution Area — MDA).
• Распределительный пункт горизонтальной подсистемы кабельной системы ЦОД (Horizontal Distribution Area — HDA).
• Распределительный пункт зоны (Zone Distribution Area — ZDA).
• Распределительный пункт оборудования (Equipment Distribution Area — EDA).
Комната для ввода кабелей — это помещение, в котором кабельная система ЦОД соединяется с кабельными системами кампуса и операторов сетей общего пользования. Она может находиться как снаружи, так и внутри компьютерного зала. При организации соединения названных кабельных систем внутри компьютерного зала соответствующие средства можно оборудовать в MDA.
С целью резервирования элементов инфраструктуры ЦОД или соблюдения ограничений на максимальную длину каналов связи в ЦОД можно организовать несколько комнат для ввода кабелей. Например, максимальная длина канала T-1, как правило, не должна превышать 200 м, тогда как типичное ограничение на длину канала T-3 составляет 137 м. Однако использование тех или иных типов кабеля и промежуточных коммутационных панелей в ряде случаев суще-ственно уменьшает максимально допустимую длину линии. В стандарте TIA/EIA-942 имеются рекомендации по максимальной длине кабельных каналов в ЦОД.
MDA содержит главный кросс, являющийся центром коммутации каналов кабельной системы ЦОД. В помещении MDA могут находиться и горизонтальные кроссы, предназначенные для коммутации горизонтальных кабелей, идущих к оборудованию, которое напрямую взаимодействует с оборудованием MDA. Кроме того, в помещении MDA обычно устанавливают маршрутизаторы и магистральные коммутаторы локальной сети и сети SAN ЦОД. Согласно стандарту, ЦОД должен иметь по крайней мере один MDA, а в целях резервирования допускается организация второго MDA.
Помещение HDA предназначено для установки горизонтального кросса, с помощью которого осуществляется коммутация горизонтальных кабелей, идущих к оборудованию EDA, а также переключателей KVM и коммутаторов ЛВС и SAN, взаимодействующих с оборудованием HDA.
ZDA — факультативный элемент горизонтальной подсистемы, располагающийся между HDA и EDA. Он призван обеспечить гибкость реконфигурации этой подсистемы. В ZDA горизонтальные кабели терминируются в зоновых розетках или точках консолидации. Подключение оборудования к зоновым розеткам осуществляется посредством соединительных кабелей. Стандарт не рекомендует размещать в ZDA коммутационную панель или активное оборудование, за исключением устройств подачи электропитания по горизонтальным кабелям.
EDA — это участок ЦОД, выделенный для размещения оконечного оборудования, в том числе компьютеров и телекоммуникационных устройств. В EDA горизонтальные кабели терминируются на розетках, которые обычно располагают на коммутационных панелях, устанавливаемых в монтажных стойках или шкафах. Стандартом допускается и соединение устройств EDA напрямую друг с другом (например, blade-серверы могут напрямую подключаться к коммутаторам, а обычные серверы — к периферийным устройствам).
В составе ЦОД вне пределов компьютерного зала можно оборудовать телекоммуникационную комнату, предназначенную для поддержки горизонтальных кабелей, проложенных к офисам обслуживающего персонала, центру управления, помещениям с механическим и электрическим оборудованием и другим помещениям или участкам ЦОД, расположенным вне стен компьютерного зала. Типичный ЦОД имеет одну или две комнаты для ввода кабелей, одну или несколько телекоммуникационных комнат, один MDA и несколько HDA.
Кабельная система ЦОД состоит из следующих элементов:
• горизонтальная подсистема;
• магистральная подсистема;
• входной кросс, находящийся в комнате для ввода кабелей или в помещении MDA (если комната ввода кабелей объединена с MDA);
• главный кросс, установленный в MDA;
• горизонтальный кросс, размещенный в HDA, MDA или в телекоммуникационной комнате;
• зоновая розетка или точка консолидации, смонтированная в ZDA;
• розетка, установленная в EDA.
Горизонтальная подсистема — это часть кабельной системы ЦОД, проходящая между розеткой в EDA (или зоновой розеткой в ZDA) и горизонтальным кроссом, который находится в HDA или MDA. В состав горизонтальной подсистемы может входить факультативная точка консолидации. Магистральная подсистема связывает MDA с HDA, телекоммуникационными комнатами и комнатами для ввода кабелей.
Горизонтальная и магистральная подсистемы кабельной системы ЦОД имеют топологию типа “звезда”. Горизонтальные кабели подключаются к горизонтальному кроссу в HDA или MDA. С целью резервирования путей передачи данных разные розетки в EDA или ZDA можно соединять (горизонтальными кабелями) с разными горизонтальными кроссами.
В звездообразной топологии магистральной подсистемы каждый горизонтальный кросс, расположенный в HDA, подключен напрямую к главному кроссу в MDA. Промежуточных кроссов в кабельной инфраструктуре ЦОД не предусмотрено.
Чтобы повысить надежность работы инфраструктуры, как уже отмечалось, допускается резервирование HDA. В этом случае все горизонтальные кроссы должны быть связаны с основным и резервным HDA.
Стоит также отметить, что для резервирования элементов инфраструктуры и поддержки приложений, которые не могут функционировать из-за того, что длина путей передачи данных в рамках звездообразной топологии превышает максимальную дальность связи с использованием этих приложений, допускается организация прямых кабельных соединений между HDA. Кроме того, для соблюдения ограничений на максимальную длину кабельных каналов разрешено организовывать прямые соединения между второй комнатой для ввода кабелей и помещениями HDA.
Для поддержки разнообразных приложений стандарт TIA/EIA-942 допускает установку самых разных типов кабелей, но при этом в новых инсталляциях рекомендует использовать кабели с максимально широкой полосой пропускания. Это весьма значительно увеличивает возможный срок службы кабельной инфраструктуры ЦОД.
К разрешенным стандартом типам кабелей относятся:
• 100-Ом кабель из витых пар, соответствующий стандарту ANSI/TIA/EIA-568-B.2; рекомендуется использовать кабель категории 6, специфицированный в приложении ANSI/TIA/EIA-568-B.2-1.
• Кабель с 62,5/125-мкм или 50/125-мкм многомодовым волокном, соответствующий стандарту ANSI/TIA/EIA-568-B.3; рекомендуется использовать 50/125-мкм многомодовое волокно, оптимизированное для работы с 850-нм лазером и специфицированное в документе ANSI/TIA-568-B.3-1.
• Одномодовый оптоволоконный кабель стандарта ANSI/TIA/EIA-568-B.3.
• 75-Ом коаксиальный кабель (типа 734 или 735), соответствующий документу GR-139-CORE фирмы Telcordia Technologies, и коаксиальные разъемы стандарта ANSI T1.404. Эти кабели и разъемы рекомендованы для организации каналов T-3, E-1 и E-3.
Прокладка кабелей и размещение оборудования
Для прокладки кабелей в ЦОД стандарт TIA/EIA-942 разрешает использовать самые разные полости и конструкции, включая пространство под фальшполом и верхние кабельные лотки, уже получившие широкое распространение в ЦОД. Стандарт рекомендует реализовывать фальшполы в тех ЦОД, где предполагается высокая концентрация оборудования с большим энергопотреблением, или устанавливать большую компьютерную систему, сконструированную для подвода кабелей снизу. Под фальшполом телекоммуникационные кабели следует размещать в кабельных лотках, причем они не должны мешать потоку воздуха и иметь острых краев.
Верхние кабельные лотки стандарт рекомендует подвешивать к потолку, а не прикреплять их к верхним частям монтажных стоек или шкафов. Это обеспечивает большую гибкость применения монтажного оборудования разной высоты. И еще. Размещать осветительные приборы и водораспыляющие головки нужно в проходах между рядами стоек или шкафов с оборудованием, а не прямо над ними.
Согласно стандарту, для организации так называемых холодных и горячих проходов между рядами стоек или шкафов с оборудованием их следует устанавливать таким образом, чтобы стойки или шкафы соседних рядов были обращены либо передними, либо задними сторонами друг к другу. Холодные проходы образуются впереди стоек или шкафов — в этих проходах плиты фальшпола имеют отверстия, через которые в помещение ЦОД поступает холодный воздух. Силовые кабели обычно прокладывают под холодными проходами. Соседние с ними проходы называются горячими — в ту сторону обращены задние части шкафов или стоек. Лотки с телекоммуникационными кабелями, как правило, располагают под горячими проходами.
В стойках или шкафах оборудование должно быть смонтировано так, чтобы его вентиляционные отверстия, через которые всасывается холодный воздух, находились в передней части шкафа или стойки, а выход горячего воздуха осуществлялся в задней части. В противном случае система охлаждения оборудования, основанная на концепции холодных и горячих проходов, не будет работать. Данная концепция ориентирована на устройства, в которых охлаждающий воздух перемещается от передней панели к задней.
Чтобы обеспечивать надлежащее охлаждение установленного оборудования, монтажные шкафы должны иметь средства воздухообмена. Если шкафы не оснащены вентиляторами, способствующими более эффективному функционированию горячих и холодных проходов, то в дверях шкафов должно быть большое число вентиляционных отверстий или прорезей, общая площадь которых составляла бы не менее половины площади двери.
Для удобства монтажа оборудования и прокладки кабелей проходы между рядами шкафов или стоек не должны быть слишком узкими. Рекомендуемое расстояние между передними сторонами стоек или шкафов (соседних рядов) — 1,2 м, а минимальное — 0,9 м. Расстояние между задними сторонами стоек или шкафов (опять же соседних рядов) должно составлять 0,9 м, а минимальное — 0,6 м.
Размещать ряды стоек или шкафов нужно так, чтобы можно было снимать плиты фальшпола спереди и сзади ряда. Таким образом, все шкафы следует выравнивать вдоль краев плит фальшпола. Чтобы резьбовые стержни, которыми монтажные стойки крепятся к межэтажным перекрытиям, не попадали на крепежные элементы плит фальшпола, стойки устанавливаются ближе к центру этих плит.
Размеры прорезей в плитах фальшпола, находящихся под стойками или шкафами, должны быть не больше, чем это необходимо, чтобы свести к минимуму снижение давления воздуха под фальшполом. Кроме того, для минимизации продольной электромагнитной связи между силовыми и телекоммуникационными кабелями из витых пар в стандарте TIA/EIA-942 оговорены требования к расстоянию между ними.
Стандарт TIA/EIA-942 разрабатывается с целью удовлетворения потребности ИТ-отрасли в рекомендациях по проектированию инфраструктуры для любого ЦОД независимо от его размеров (небольшой, средний или крупный) и характера использования (корпоративный ЦОД или ЦОД, в котором базируются Интернет-серверы разных компаний).
[ http://www.ccc.ru/magazine/depot/04_13/read.html?1102.htm]
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > telecommunications infrustructure standard for data centers
-
3 power supply
- энергоснабжение
- электроснабжение
- электропитание
- сетевое питание
- источник электропитания радиоэлектронной аппаратуры
- источник питания (в электроснабжении)
- источник питания
- импульсный источник (электро)питания
импульсный источник (электро)питания
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
источник питания
Характеристики внешних источников питания следует принимать по техническим условиям на присоединение, выдаваемым энегоснабжающей организацией в соответствии с Правилами пользования электрической энергией...
источник питания электроэнергией
-
[Интент]
источник электропитания
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]
Основными источниками питания должны служить электростанции и сети районных энергосистем. Исключение представляют большие предприятия с большим теплопотреблением, где основным источником питания может быть собственная электростанция (ТЭЦ). Но и в этом случае обязательно должна предусматриваться связь системы электроснабжения предприятия с сетью энергосистемы.
[СН 174-75 Инструкция по проектированию электроснабжения промышленных предприятий]
1.1.2 Зануление следует выполнять электрическим соединением металлических частей электроустановок с заземленной точкой источника питания электроэнергией при помощи нулевого защитного проводника.
[ ГОСТ 12.1.030-81]
Параллельные тексты EN-RUIt is recommended that, where practicable, the electrical equipment of a machine is connected to a single incoming supply. Where another supply is necessary for certain parts of the equipment (for example, electronic equipment that operates at a different voltage), that supply should be derived, as far as is practicable, from devices (for example, transformers, converters) forming part of the electrical equipment of the machine.
[IEC 60204-1-2006]Рекомендуется, там где это возможно, чтобы электрооборудование машины получало электропитание от одного источника. Если для каких-либо частей электрооборудования машины (например для электронного оборудования, работающего на другом напряжении) необходим отдельный источник питания, то, насколько это возможно, он должен являться частью (такой, например, как трансформатор, конвертор) электрооборудования этой же машины.
[Перевод Интент]
Power supplies
The required power supplies can be determined based on the criteria for definition of the installation (receivers, power, location, etc.) and the operating conditions (safety, evacuation of the public, continuity, etc.).
They are as follows:
- Main power supply
- Replacement power supply
- Power supply for safety services
- Auxiliary power supply
[Legrand]Источники электропитания
Источники электропитания определяют по различным критериям, в соответствии с характеристиками конкретной электроустановки. Определяют типы электроприемников, их мощность, территориальное расположение и др. При этом учитывают условия эксплуатации (безопасность, требования к аварийной эвакуации людей, непрерывность технологического процесса и т. д.).
Применяют следующие источники:
- основной источник питания;
- резервный источник питания;
- аварийный источник питания систем безопасности;
- дополнительный источник питания.
[Перевод Интент]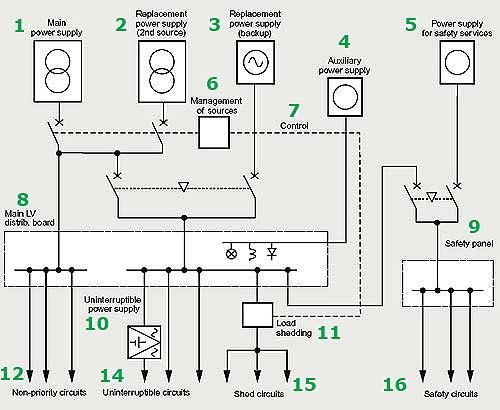
Рис. Legrand
Типовая схема электроснабжения: 1 - Main power supply - Основной источник питания
2 - Replacement power supply (2nd source) - Резервный источник питания (2-й источник)
3 - Replacement power supply (backup) - Резервный источник питания (независимый)
4 - Auxiliary power supply - Дополнительный источник питания
5 - Power supply for safety services - Аварийный источник питания для систем безопасности
6 - Management of sources - Управление источниками питания
7 - Control - Цепь управления
8 - Main LV distrib. board - Главный распределительный щит (ГРЩ)
9 - Safety panel - Панель безопасности
10 - Uninterruptible power supply - Источник бесперебойного питания
11 - Load shedding - Отключение нагрузки
12 - Non-priority circuits - Цепи неприоритетной нагрузки
14 - Uninterruptible circuits - Цепи бесперебойного питания
15 - Shed circuits - Цепи отключаемой нагрузки
16 - Safety circuits - Цепи систем безопасностиТематики
Близкие понятия
Действия
Синонимы
Сопутствующие термины
- аварийный источник питания
- взаимно резервируемые источники питания
- внешний источник питания
- дополнительный источник питания
- источник бесперебойного питания
- источник питания с ограничением тока
- независимый источник питания
- основной источник питания
- резервный источник питания
EN
источник электропитания радиоэлектронной аппаратуры
источник электропитания РЭА
Нерекомендуемый термин - источник питания
Устройство силовой электроники, входящее в состав радиоэлектронной аппаратуры и преобразующее входную электроэнергию для согласования ее параметров с входными параметрами составных частей радиоэлектронной аппаратуры.
[< size="2"> ГОСТ Р 52907-2008]
источник питания
Часть устройства, обеспечивающая электропитание остальных модулей устройства.
[ http://www.lexikon.ru/dict/net/index.html]EN
power supply
An electronic module that converts power from some power source to a form which is needed by the equipment to which power is being supplied.
[Comprehensive dictionary of electrical engineering / editor-in-chief Phillip A. Laplante.-- 2nd ed.]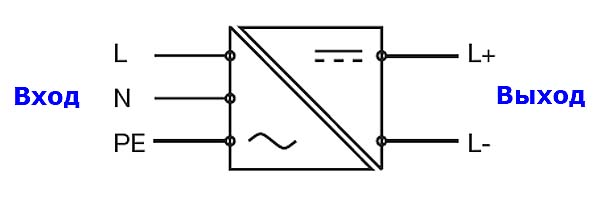
Рис. ABB
Структурная схема источника электропитанияThe input side and the output side are electrically isolated against each other
Вход и выход гальванически развязаны
Терминология относящая к входу
Primary side
Первичная сторона
Input voltage
Входное напряжение
Primary grounding
Current consumption
Потребляемый ток
Inrush current
Пусковой ток
Input fuse
Предохранитель входной цепи
Frequency
Частота
Power failure buffering
Power factor correction (PFC)
Коррекция коэффициента мощности
Терминология относящая к выходу
Secondary side
Вторичная сторона
Output voltage
Выходное напряжение
Secondary grounding
Short-circuit current
То короткого замыкания
Residual ripple
Output characteristics
Выходные характеристики
Output current
Выходной ток
Различают первичные и вторичные источники питания.
К первичным относят преобразователи различных видов энергии в электрическую, например:
- аккумулятор (преобразует химическую энергию.
Вторичные источники не генерируют электроэнергию, а служат лишь для её преобразования с целью обеспечения требуемых параметров (напряжения, тока, пульсаций напряжения и т. п.)Задачи вторичного источника питания
- Обеспечение передачи мощности — источник питания должен обеспечивать передачу заданной мощности с наименьшими потерями и соблюдением заданных характеристик на выходе без вреда для себя. Обычно мощность источника питания берут с некоторым запасом.
- Преобразование формы напряжения — преобразование переменного напряжения в постоянное, и наоборот, а также преобразование частоты, формирование импульсов напряжения и т. д. Чаще всего необходимо преобразование переменного напряжения промышленной частоты в постоянное.
- Преобразование величины напряжения — как повышение, так и понижение. Нередко необходим набор из нескольких напряжений различной величины для питания различных цепей.
- Стабилизация — напряжение, ток и другие параметры на выходе источника питания должны лежать в определённых пределах, в зависимости от его назначения при влиянии большого количества дестабилизирующих факторов: изменения напряжения на входе, тока нагрузки и т. д. Чаще всего необходима стабилизация напряжения на нагрузке, однако иногда (например для зарядки аккумуляторов) необходима стабилизация тока.
- Защита — напряжение или ток нагрузки в случае неисправности (например, короткого замыкания) каких-либо цепей может превысить допустимые пределы и вывести электроприбор или сам источник питания из строя. Также во многих случаях требуется защита от прохождения тока по неправильному пути: например прохождения тока через землю при прикосновении человека или постороннего предмета к токоведущим частям.
- Гальваническая развязка цепей — одна из мер защиты от протекания тока по неверному пути.
- Регулировка — в процессе эксплуатации может потребоваться изменение каких-либо параметров для обеспечения правильной работы электроприбора.
- Управление — может включать регулировку, включение/отключение каких-либо цепей или источника питания в целом. Может быть как непосредственным (с помощью органов управления на корпусе устройства), так и дистанционным, а также программным (обеспечение включения/выключения, регулировка в заданное время или с наступлением каких-либо событий).
- Контроль — отображение параметров на входе и на выходе источника питания, включения/выключения цепей, срабатывания защит. Также может быть непосредственным или дистанционным.
Трансформаторный (сетевой) источник питания
Чаще всего состоит из следующих частей:- Сетевого трансформатора, преобразующего величину напряжения, а также осуществляющего гальваническую развязку;
- Выпрямителя, преобразующего переменное напряжение в пульсирующее;
- Фильтра для снижения уровня пульсаций;
- Стабилизатора напряжения для приведения выходного напряжения в соответствие с номиналом, также выполняющего функцию сглаживания пульсаций за счёт их «срезания».
В сетевых источниках питания применяются чаще всего линейные стабилизаторы напряжения, а в некоторых случаях и вовсе отказываются от стабилизации.
Достоинства такой схемы:- Простота построения и обслуживания
- Надёжность
- Низкий уровень радиопомех.
Недостатки:
- Большой вес и габариты, особенно при большой мощности: по большей части за счёт габаритов трансформатора и сглаживающего фильтра
- Металлоёмкость
- Применение линейных стабилизаторов напряжения вводит компромисс между стабильностью выходного напряжения и КПД: чем больше диапазон изменения напряжения, тем больше потери мощности.
- При отсутствии стабилизатора на выход источника питания проникают пульсации с частотой 100Гц.
В целом ничто не мешает применить в трансформаторном источнике питания импульсный стабилизатор напряжения, однако большее распространение получила схема с полностью импульсным преобразованием напряжения.
Импульсный источник питания
Широко распространённая схема импульсного источника питания состоит из следующих частей:- Входного фильтра, призванного предотвращать распространение импульсных помех в питающей сети
- Входного выпрямителя, преобразующего переменное напряжение в пульсирующее
- Фильтра, сглаживающего пульсации выпрямленного напряжения
- Прерывателя (обычно мощного транзистора, работающего в ключевом режиме)
- Цепей управления прерывателем (генератора импульсов, широтно-импульсного модулятора)
- Импульсного трансформатора, который служит накопителем энергии импульсного преобразователя, формирования нескольких номиналов напряжения, а также для гальванической развязки цепей (входных от выходных, а также, при необходимости, выходных друг от друга)
- Выходного выпрямителя
- Выходных фильтров, сглаживающих высокочастотные пульсации и импульсные помехи.
Достоинства такого блока питания:
- Можно достичь высокого коэффициента стабилизации
- Высокий КПД. Основные потери приходятся на переходные процессы, которые длятся значительно меньшее время, чем устойчивое состояние.
- Малые габариты и масса, обусловленные как меньшим выделением тепла на регулирующем элементе, так и меньшими габаритами трансформатора, благодаря тому, что последний работает на более высокой частоте.
- Меньшая металлоёмкость, благодаря чему мощные импульсные источники питания стоят дешевле трансформаторных, несмотря на бо́льшую сложность
- Возможность включения в сети широкого диапазона напряжений и частот, или даже постоянного тока. Благодаря этому возможна унификация техники, производимой для различных стран мира, а значит и её удешевление при массовом производстве.
Однако имеют такие источники питания и недостатки, ограничивающие их применение:
- Импульсные помехи. В связи с этим часто недопустимо применение импульсных источников питания для некоторых видов аппаратуры.
- Невысокий cosφ, что требует включения компенсаторов коэффициента мощности.
- Работа большей части схемы без гальванической развязки, что затрудняет обслуживание и ремонт.
- Во многих импульсных источниках питания входной фильтр помех часто соединён с корпусом, а значит такие устройства требуют заземления.
[Википедия]
Недопустимые, нерекомендуемые
Тематики
Обобщающие термины
Синонимы
EN
Параллельные тексты EN-RU Safely OS shutdown and protection from data loss during power failure
Корректное завершение работы ОС с сохранением данных при нарушении сетевого питания
[Перевод Интент]EN
электропитание
-
[IEV number 151-13-75]EN
power supply
provision of electric energy from a source
[IEV number 151-13-75]FR
alimentation électrique, f
fourniture d'énergie électrique à partir d’une source
[IEV number 151-13-75]2
электропитание
-
[IEV number 151-13-76]EN
power supply
electric energy converter which draws electric energy from a source and supplies it in a specified form to a load
[IEV number 151-13-76]FR
alimentation électrique, f
convertisseur d’énergie électrique qui prélève de l'énergie électrique à une source et la restitue sous une forme spécifiée à une charge
[IEV number 151-13-76]Тематики
Действия
- нарушение электропитания
- обеспечивать электропитание для работы...
- отключение электропитания
- подача электропитания на...
- подвод электропитания
- поддерживать электропитание
- прерывание электропитания
Синонимы
Сопутствующие термины
- (электро)питание (электро)приемников
- (электро)питание (электро)приемников от сети переменного тока
- (электро)питание непрерывным напряжением переменного тока
- бесперебойность (электро)питания
- кабель электропитания
- категория электропитания
- линия электропитания
- надежность электропитания
- напряжение электропитания
- непрерывное (электро)питание нагрузки
- непрерывность (электро)питания
- нестабильность электропитания
- перерыв (электро)питания
- сеть электропитания
- трехфазная система электропитания
- цепи электропитания переменного (постоянного) тока
EN
DE
FR
электроснабжение
Обеспечение потребителей электрической энергией.
[ ГОСТ 19431-84]Качество электрической энергии (КЭ) тесно связано с надежностью электроснабжения, поскольку нормальным режимом электроснабжения потребителей является такой режим, при котором потребители получают электроэнергию бесперебойно, в количестве, заранее согласованном с энергоснабжающей организацией, и нормированного качества.
[В. В. Суднова. Качество электрической энергии]Тематики
Действия
Сопутствующие термины
- бесперебойность электроснабжения
- надежность электроснабжения
- нарушение электроснабжения
- нормальный режим электроснабжения
- проект электроснабжения
- электроснабжение от автономного источника питания электроэнергией
EN
3.21 источник питания (power supply): Источник электрической энергии, к которому предполагается подключать оборудование связи (в контексте требований настоящего стандарта).
Источник: ГОСТ Р 55266-2012: Совместимость технических средств электромагнитная. Оборудование сетей связи. Требования и методы испытаний оригинал документа
Англо-русский словарь нормативно-технической терминологии > power supply
4 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
5 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
6 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
7 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
8 SCADA
диспетчерское управление и сбор данных
Подсистема сбора, хранения и обработки телеметрической информации, поступающей от удаленных датчиков, осуществляющих измерение температуры, давления, расхода электроэнергии и др. Сбор данных осуществляется с помощью контроллеров, программное обеспечение которых позволяет реализовать практически любой алгоритм опроса датчиков, а также обеспечить первичную обработку информации. Обмен данными часто осуществляется через интерфейс RS-485. Термин SCADA обычно употребляют, когда речь идет о контроле и регулировании каких-либо производственных процессов.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > SCADA
9 SCADA system
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > SCADA system
10 Supervisory for Control And Data Acquision
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > Supervisory for Control And Data Acquision
11 grid computing
сетевые (коллективные, параллельные, распределённые) вычисления, "решётки" вычислительных ресурсов, grid-вычисленияраспределённая вычислительная среда с динамическим (во время исполнения приложений) выбором, разделением и интеграцией географически разнесённых автономных ресурсов по требованию - с учётом их готовности, производительности и стоимости, а также конкретных вычислительных потребностей и политики организации; термин относится преимущественно к архитектуре глобальных, региональных и учрежденческих компьютерных сетей, которая предусматривает выделение свободных в данный момент вычислительных сетевых ресурсов при решении задач, слишком сложных для отдельно взятого компьютера, и требует специального ПО. Такая технология позволяет совместно работающим организациям по сути создавать из разнородных ресурсов единую синергетическую систему, наиболее эффективно использующую возможности компьютеров, суперкомпьютеров, сетей, баз данных и научных инструментов, принадлежащих каждой из организаций. Подобный подход обеспечивает высокую производительность, гибкость, экономичность, масштабируемость, готовность системы - причём всё это одновременно. Различают такие типы grid-систем, как вычислительные grid-системы (computational grid); grid-перехватчики (scavenging grid); и grid-системы управления данными (data grid)Англо-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. > grid computing
12 firewall
- противопожарная перегородка
- межсетевой экран
- межсетевой шлюз
- межсетевое устройство защиты
- брандмауэр
брандмауэр
Аппаратно-программный комплекс, создающий защитный барьер (межсетевой экран) между двумя или несколькими сетями. Предназначен для предотвращения несанкционированного доступа в защищаемую сеть извне и контроля поступающих и выходящих данных. Брандмауэр устанавливается на границе защищаемой сети, причем его присутствие не должно быть заметно для сетевых узлов.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
- firewall
- FW
межсетевое устройство защиты
межсетевой фильтр
брандмауэр
заслон
аппаратно-программное средство сетевой защиты
1. Система защиты от несанкционированного доступа в защищаемую сеть.
2. Система защиты между секретными и общедоступными объектами в сети.
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
- firewall
- FW
межсетевой шлюз
брандмауэр
экранирующий фильтр
Программные или программно-аппаратные средства, позволяющие вести в сети определенную политику разграничения доступа к ресурсам.
[http://www.rfcmd.ru/glossword/1.8/index.php?a=index&d=23]Тематики
Синонимы
EN
межсетевой экран
МЭ
брандмауэр
Система (аппаратная или программная) или комбинация систем, образующая в целях защиты границу между двумя или более сетями, предохраняя от несанкционированного попадания в сеть или предупреждая выход из нее пакетов данных. Используется также для разграничения доступа внутри корпоративной сети, при наличии в ней участков с информацией, требующей секретности. Обычно функционирует на маршрутизаторах или выделенных серверах. МЭ уровня сети (или пакетный фильтр) исследует трафик сети на уровне пакетов сетевого протокола. Они могут, в частности, изымать из обращения пакеты на основании их номеров портов TCP и UDP, чтобы разрешить определенные типы соединений особо доверенным серверам. МЭ уровня приложения исследует трафик на уровне приложения, например FTP, электронной почты или Telnet. Часто также переадресует исходящий трафик, придавая ему вид порожденного самим МЭ, а не внутренней хост-системой.
[ http://www.morepc.ru/dict/]
брандмауэр
Брандмауэр служит барьером между сетями, например локальной сетью и глобальной сетью Интернет. Брандмауэр обеспечивает доступ из одной сети в другую только авторизованным пользователям. Это может быть как программа, установленная на компьютере, так и отдельное устройство.
[ http://www.alltso.ru/publ/glossarij_setevoe_videonabljudenie_terminy/1-1-0-34]Тематики
Синонимы
EN
противопожарная перегородка
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
3.12 межсетевой экран (firewall): Вид барьера безопасности, размещенного между различными сетевыми средами, состоящего из специализированного устройства или совокупности нескольких компонентов и технических приемов, через который должен проходить весь трафик из одной сетевой среды в другую и наоборот. При этом межсетевой экран пропускает только авторизованный трафик, соответствующий местной политике безопасности.
Источник: ГОСТ Р ИСО/МЭК 18028-1-2008: Информационная технология. Методы и средства обеспечения безопасности. Сетевая безопасность информационных технологий. Часть 1. Менеджмент сетевой безопасности оригинал документа
3.12 межсетевой экран (firewall): Вид барьера безопасности, размещенного между различными сетевыми средами, состоящего из специализированного устройства или совокупности нескольких компонентов и технических приемов, через который должен проходить весь трафик из одной сетевой среды в другую и, наоборот, при этом пропускается только авторизованный трафик, соответствующий местной политике безопасности.
Источник: ГОСТ Р ИСО/МЭК 27033-1-2011: Информационная технология. Методы и средства обеспечения безопасности. Безопасность сетей. Часть 1. Обзор и концепции оригинал документа
3.29 межсетевой экран (firewall): Совокупность компонентов, помещенных между двумя сетями, которые вместе обладают следующими свойствами:
- весь входящий и исходящий сетевой трафик должен проходить через межсетевой экран;
- пропускается только сетевой трафик, авторизованный в соответствии с локальной политикой безопасности;
- межсетевой экран сам по себе устойчив к проникновению.
Источник: ГОСТ Р ИСО/ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
3.29 межсетевой экран (firewall): Совокупность компонентов, помещенных между двумя сетями, которые вместе обладают следующими свойствами:
- весь входящий и исходящий сетевой трафик должен проходить через межсетевой экран;
- пропускается только сетевой трафик, авторизованный в соответствии с локальной политикой безопасности;
- межсетевой экран сам по себе устойчив к проникновению.
Источник: ГОСТ Р ИСО ТО 13569-2007: Финансовые услуги. Рекомендации по информационной безопасности
Англо-русский словарь нормативно-технической терминологии > firewall
См. также в других словарях:
Мониторинг и анализ сетей — Мониторинг сетей целенаправленное воздействие на сеть, осуществляемое для организации ее функционирования по заданной программе: включение и отключение системы, каналов передачи данных, терминалов, диагностика неисправностей, сбор… … Википедия
ГОСТ 26342-84: Средства охранной, пожарной и охранно-пожарной сигнализации. Типы, основные параметры и размеры — Терминология ГОСТ 26342 84: Средства охранной, пожарной и охранно пожарной сигнализации. Типы, основные параметры и размеры оригинал документа: Активный оптико электронный охранный (охранно пожарный) извещатель Извещатель, формирующий извещение о … Словарь-справочник терминов нормативно-технической документации
Абонентская система обработки данных — ТИПЫ СИСТЕМ И СЕТЕЙ 90. Абонентская система обработки данных Абонентская система Subscriber system Система обработки данных, выполняющая функции, связанные с предоставлением или потреблением ресурсов вычислительной сети Источник: ГОСТ 24402 88:… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения — Терминология ГОСТ 24402 88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа: ТИПЫ СИСТЕМ И СЕТЕЙ 90. Абонентская система обработки данных Абонентская система Subscriber system Система обработки данных,… … Словарь-справочник терминов нормативно-технической документации
Питающие электрические сети — 312 Питающие электрические сети Необходимо оценить следующие характеристики питающих электрических сетей: типы систем токоведущих проводников; типы систем заземления; способы и устройства защиты от пожара (взрыва). 312.1 Типы систем токоведущих… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 30331.2-95: Электроустановки зданий. Часть 3. Основные характеристики — Терминология ГОСТ 30331.2 95: Электроустановки зданий. Часть 3. Основные характеристики оригинал документа: 321 Внешние воздействующие факторы (ВВФ) окружающей среды Код Обозначение класса Характеристика Примеры применения Ссылки на МЭК 721… … Словарь-справочник терминов нормативно-технической документации
СССР. Технические науки — Авиационная наука и техника В дореволюционной России был построен ряд самолётов оригинальной конструкции. Свои самолёты создали (1909 1914) Я. М. Гаккель, Д. П. Григорович, В. А. Слесарев и др. Был построен 4 моторный самолёт… … Большая советская энциклопедия
ГОСТ Р 50571.2-94: Электроустановки зданий. Часть 3. Основные характеристики — Терминология ГОСТ Р 50571.2 94: Электроустановки зданий. Часть 3. Основные характеристики оригинал документа: 313 Источники питания 313.1 Общие положения 313.1.1 Источники питания оценивают по следующим характеристикам: род тока и его частота;… … Словарь-справочник терминов нормативно-технической документации
Viaccess — Система условного доступа (англ. Conditional Access System) Система Условного Доступа. Предназначена для ограничения доступа к цифровым ТВ программам. Только кодирование позволяет эффективно осуществлять принцип оплаты за просмотр телевизионных… … Википедия
Удалённые сетевые атаки — Удалённая сетевая атака информационное разрушающее воздействие на распределённую вычислительную систему (ВС), осуществляемое программно по каналам связи. Содержание 1 Введение 2 Классификация атак … Википедия
NetCracker — Technology Тип производитель OSS Год основания 1993 Основатели … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на все языки
со всех языков на английский- Со всех языков на:
- Английский
- С английского на:
- Русский